|
|

|

|
| e-Pub |
Section: New Results
3D object and scene modeling, analysis, and retrieval
|
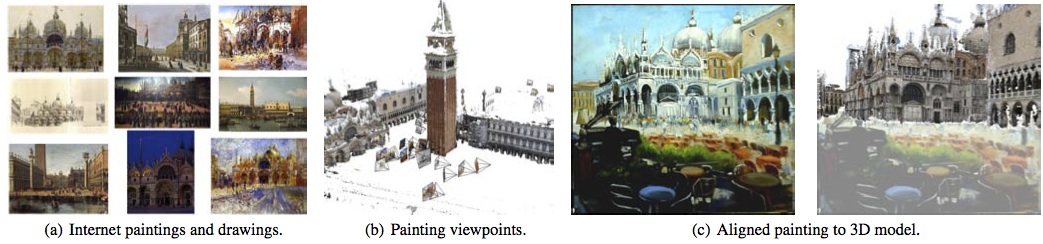
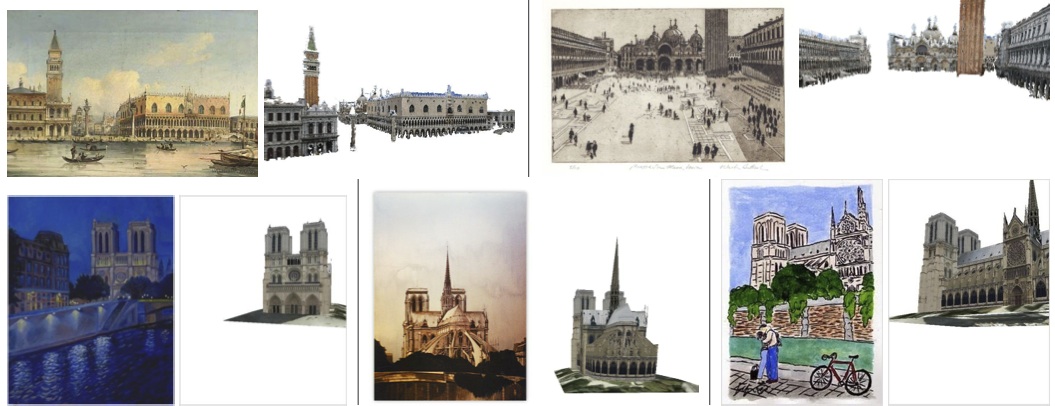
Painting-to-3D Model Alignment Via Discriminative Visual Elements
Participants : Mathieu Aubry, Bryan Russell [Intel Labs] , Josef Sivic.
In this work we describe a technique that can reliably align arbitrary 2D depictions of an architectural site, including drawings, paintings and historical photographs, with a 3D model of the site. This is a tremendously difficult task as the appearance and scene structure in the 2D depictions can be very different from the appearance and geometry of the 3D model, e.g., due to the specific rendering style, drawing error, age, lighting or change of seasons. In addition, we face a hard search problem: the number of possible alignments of the painting to a large 3D model, such as a partial reconstruction of a city, is huge. To address these issues, we develop a new compact representation of complex 3D scenes. The 3D model of the scene is represented by a small set of discriminative visual elements that are automatically learnt from rendered views. Similar to object detection, the set of visual elements, as well as the weights of individual features for each element, are learnt in a discriminative fashion. We show that the learnt visual elements are reliably matched in 2D depictions of the scene despite large variations in rendering style (e.g. watercolor, sketch, historical photograph) and structural changes (e.g. missing scene parts, large occluders) of the scene. We demonstrate an application of the proposed approach to automatic re-photography to find an approximate viewpoint of historical paintings and photographs with respect to a 3D model of the site. The proposed alignment procedure is validated via a human user study on a new database of paintings and sketches spanning several sites. The results demonstrate that our algorithm produces significantly better alignments than several baseline methods. This work has been accepted for publication to the ACM Transactions on Graphics (ACM ToG). The problem addressed in this work is illustrated in Figure 1 and example results are shown in figure 2 . The pre-print is available online at [10] .
|
Learning and Calibrating Per-Location Classifiers for Visual Place Recognition
Participants : Petr Gronat, Josef Sivic, Guillaume Obozinski [ENPC / Inria SIERRA] , Tomáš Pajdla [CTU in Prague] .
The aim of this work is to localize a query photograph by finding other images depicting the same place in a large geotagged image database. This is a challenging task due to changes in viewpoint, imaging conditions and the large size of the image database. The contribution of this work is two-fold. First, we cast the place recognition problem as a classification task and use the available geotags to train a classifier for each location in the database in a similar manner to per-exemplar SVMs in object recognition. Second, as only few positive training examples are available for each location, we propose a new approach to calibrate all the per-location SVM classifiers using only the negative examples. The calibration we propose relies on a significance measure essentially equivalent to the p-values classically used in statistical hypothesis testing. Experiments are performed on a database of 25,000 geotagged street view images of Pittsburgh and demonstrate improved place recognition accuracy of the proposed approach over the previous work. This work has been published at CVPR 2013 [6] .
Visual Place Recognition with Repetitive Structures
Participants : Akihiko Torii [Tokyo Institute of Technology] , Josef Sivic, Tomáš Pajdla [CTU in Prague] , Masatoshi Okutomi [Tokyo Institute of Technology] .
Repeated structures such as building facades, fences or road markings often represent a significant challenge for place recognition. Repeated structures are notoriously hard for establishing correspondences using multi-view geometry. Even more importantly, they violate the feature independence assumed in the bag-of-visual-words representation which often leads to over-counting evidence and significant degradation of retrieval performance. In this work we show that repeated structures are not a nuisance but, when appropriately represented, they form an important distinguishing feature for many places. We describe a representation of repeated structures suitable for scalable retrieval. It is based on robust detection of repeated image structures and a simple modification of weights in the bag-of-visual-word model. Place recognition results are shown on datasets of street-level imagery from Pittsburgh and San Francisco demonstrating significant gains in recognition performance compared to the standard bag-of-visual-words baseline and more recently proposed burstiness weighting. This work has been published at CVPR 2013 [9] .
Trinocular Geometry Revisited
Participants : Jean Ponce, Martial Hebert [CMU] .
When do the visual rays associated with triplets of point correspondences converge, that is, intersect in a common point? Classical models of trinocular geometry based on the fundamental matrices and trifocal tensor associated with the corresponding cameras only provide partial answers to this fundamental question, in large part because of underlying, but seldom explicit, general configuration assumptions. In this project, we use elementary tools from projective line geometry to provide necessary and sufficient geometric and analytical conditions for convergence in terms of transversals to triplets of visual rays, without any such assumptions. In turn, this yields a novel and simple minimal parameterization of trinocular geometry for cameras with non-collinear or collinear pinholes. This work has been submitted to CVPR 2014.